Computed Tomography (C.T)
Is a non-destructive three-dimensional x-ray imaging technique that is utilized prior to or instead of physically sectioning or destructively testing a device or sample. The data produced from a C.T. scan provides an internal and external three-dimensional representation of the sample (3D data volume). Using 3D rendering and analysis software the volume can be displayed such that geometry and density can be measured for comparison or defect analysis purposes. The volume can be sliced at any angle and at any position and data displayed as a 2D section (as though the sample has been physically sectioned). The data can also be viewed as a 3D rendering with perspective and shadows useful for understanding the overall structure and layout of the sample.
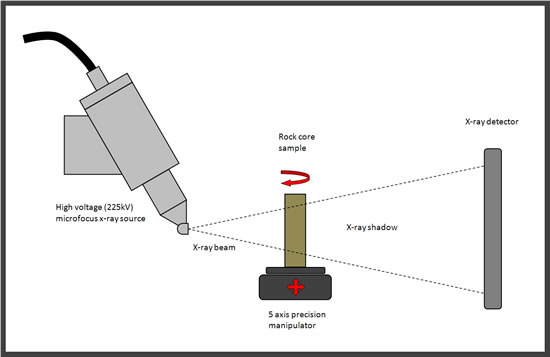
The three basic components of a C.T. and real-time radiography system are:
- A microfocus x-ray source.
- A multiple axis manipulator or stage.
- An x-ray detector.
These components are normally housed inside a lead lined x-ray cabinet which has safety interlocked doors for access to the inside of the x-ray system. Interlocks automatically shut the x-ray generation off if the door is opened while x-ray’s are on.
A typically layout is shown in Fig 1 below.
Radiographic inspection:
A sample is placed onto a manipulator (motorized 5-axis stage) inside the lead-lined x-ray cabinet and interlocked door(s) closed. A microfocus x-ray source provides a supply of high energy x-ray photons that emit from a very small point inside the tube. The physical layout of the system is such that the x-ray photons are directed toward the x-ray detector (see fig 1). The x-ray source is turned on and the sample moved into the field of view of the x-ray detector by moving the manipulator either to a pre-programmed position or by external joystick controls. The characteristics of the x-ray source (kV and uA) are set at this stage for the most suitable conditions to penetrate the sample, typically with the highest resolution and highest contrast achievable. A microfocus x-ray tube is polychromatic and emits x-ray photons of more than one x-ray energy with a maximum energy of the kV setting (keV) previously determined to be most suitable for proper penetration of the sample. Typically a sample has multiple materials and varying geometry and as x-ray photons penetrate into the sample some x-ray photons are completely absorbed into the sample whereas others are attenuated and lose some of their energy but continue through the sample material. The level of absorption and attenuation depends upon the material and the thickness of the material. The result is an x-ray shadow of varying energies. The x-ray shadow is projected onto the x-ray detector which converts the x-ray photons of varying energy into an electronic signal. The electronic signal accurately reflects the varying energy photons that have struck the x-ray sensitive area of the detector. An image processor and software within a PC converts the electronic image into a visible image.
C.T. inspection:
A C.T. system is almost identical to a radiographic x-ray system with a few small but important differences. In most cases the x-ray source and detector can be identical to a radiographic system. The manipulator or stage is usually significantly more rigid and much more precise in one or more of its axes particularly the rotational axis. The source, manipulator and detector are often mounted on a common rigid platform to minimize differential vibration and expansion. In addition the system is often chilled to further minimize differential expansion and limit the potential thermal expansion (over a C.T. scan period) of the inspected sample. The purpose of minimizing or controlling rotational precision, vibration and thermal expansion is that any uncontrolled or unexpected movement will result in blurring of the CT volume data.
The C.T. process:
A sample is placed and secured onto the manipulator and imaged. The sample is then automatically rotated (click here for video) through 360 degrees and digital radiographs (projection images) acquired at a controlled rate or at regular increments. Each projection image is a 2D radiograph of the sample at a particular rotational position that contains the geometry and attenuation property of the sample in two axes (X, Y). Once a complete 360 degree rotation has been completed and hundreds or thousands of images acquired a reconstruction process is used to re-create a volume data set that accurately represents the attenuation and three dimensional (X, Y, Z) geometric properties of the sample. The process of creating a third dimension (Z) out of a series of 2D radiographs is termed back projection. For back projection to compute the volume accurately the system geometry i.e. the position of the x-ray source, axis of rotation and x-ray detector must be precisely known. It is important to understand that the sample is being viewed by the detector looking back towards the sample and x-ray source. The step between each rotational image and subsequent back projected calculation using the known detector, sample and source geometries creates a three-dimensional pixel (voxel). By combining all 360 degrees of acquired projection images the true attenuation value (grey level) for each voxel position can be accurately calculated.
The “rules” of C.T.
- The sample must stay within the horizontal field of view of the detector.
- The sample must be penetrated at all angles of rotation.
- The sample or background surrounding the sample must not be over penetrated or “washed” out at any angle of rotation.
These rules are followed if the C.T. inspection requires correct geometric and attenuation data for accurate quantitative analysis where points of measurement are required.
For qualitative analysis where a human maybe making a judgment these rules can often be broken. As usual there are consequences to doing so, for example it is very likely that the attenuation value for a specific voxel(s) may be offset or incorrect if any of these rules are broken. This may be due to the sample moving out of the horizontal field of view of the detector as it rotates and then later in the C.T. scan moving back into the field of view. Likewise at some point a part of the sample may be either under penetrated (black data – containing no useful information) or over penetrated (saturated white data – containing no useful information) and therefore the attenuation value offset for a specific voxel(s).